Design of a Modular Mechatronic Device (MECHACELL)
Slide02
Slide12
Slide08
Slide06
Slide03
Slide01
In recent years, there has been increased usage of sensors and actuators and devices with onboard monitoring and diagnostics that enable interesting controller design opportunities. Mechatronic systems generally contain controller and monitoring sub-systems to ensure their operational performance during their life cycle. These types of systems are called Smart Mechatronic Systems.
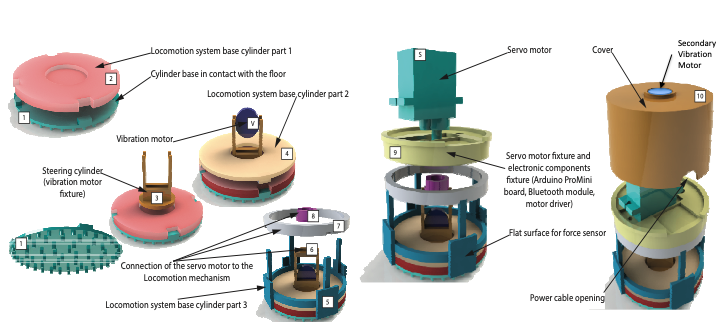
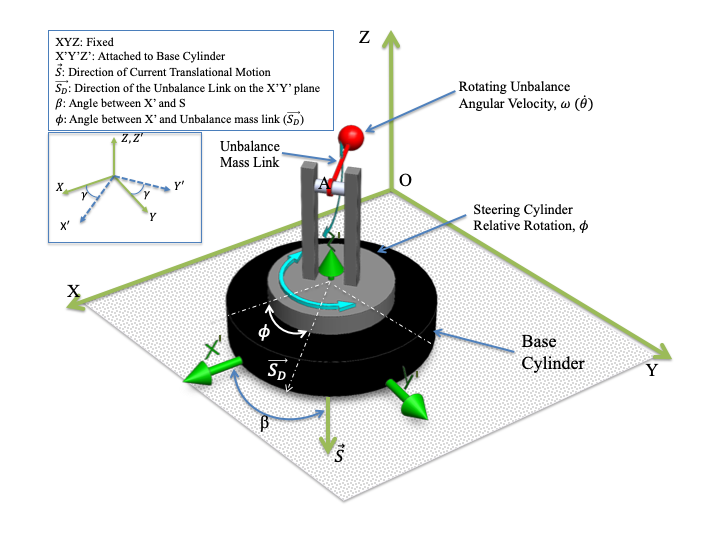
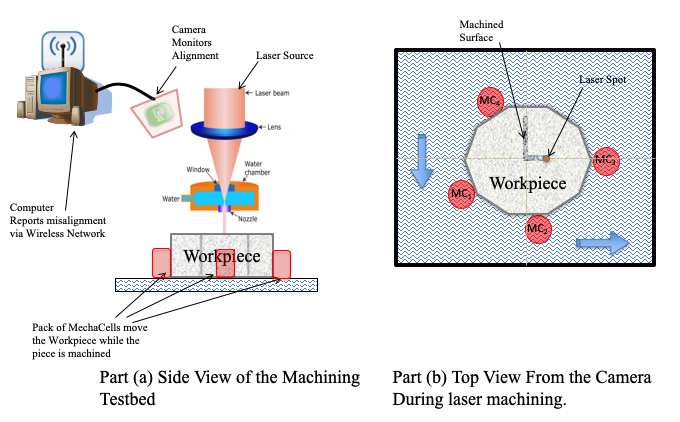
Our motivation is to apply the principle of component-sharing modularity and utilize its potential in mechatronics area by developing a scalable mechatronic module that can be used as the building block for more complicated systems. This module should be miniaturized, have the ability of both sensing and actuation, and should be strong/sturdy enough to address external disturbances such as surface friction. As a first step, the mobility of the device is tackled. The primary contributions of this research can be given as the mathematical model for a mechatronics device equipped with a novel locomotion system and its controlled algorithm, which includes a friction compensation calculation derived from the LuGre model extended for sudden directional changes. The development of a supervisory control algorithm for a dexterous manipulation system composed of identical smart mechatronic devices (MechaCells) is developed. The algorithm not only deals with the workpiece’s translation in planar coordinates but also adjusts its orientation using contact forces.
A novel and closed locomotion system design and its directed translational controller that performs on a millimeter scale were developed. Another contribution can be given as a modular, scalable manipulation algorithm that includes the orientation rather than the conventionally used caging approach.